Introduction
The contents of this page present an overview of the research and development work underway as we build towards the first release of our tAPI.
To browse the associated Google Drive directory, click here.![]()
Haply is developing the next generation of physical simulation devices using force-feedback haptic technologies. Simulated training tasks that require a high level of dexterity, can be enhanced through a digitally produced sense of touch. This sense of touch increases the immersive factor of those in training and provides important functional information about the physical interactions being practiced.
The human sense of touch is an incredibly sophisticated system. Touch displays have been developed that enable users to sense tactile cues through vibrations and temperatures. We focus on developing touch displays that recreate in a simulation the forces a user would feel interacting with a real object. These displays use a small device controller that moves freely with the human user’s hand. When the user touches something in the simulated environment, the forces of interaction are computed using a physics engine. These touch interactions are then mapped through the display to the user so that they feel objects that emulate a real physical environment.
Hardware
Haply's objective is to change the landscape of the haptic hardware available for force-feedback simulation. As part of our Innovative Solutions Canada Award and our partnership with the National Research Council of Canada, we are in a 24-month project to bring the next-generation of desktop haptic system to life.
Our key value proposition and IP has been built around portability and versitility of our haptic hardware. Compared to our competitors we have increased the work volume by over 5x, increased the force capability by 2.5x (10.5 N max force), and increased the position resolution by 3x (down to 0.03 mm resolution).
Our vision is to have surgeons capable of performing quick tool-swaps using our wireless peripherals without needing to leave their VR environments, being able to reconfigure our system to perform different training scenarios, all the while being able to pack up their device into a backpack at the end of a session and take it home with them to practice again from home.
Haptic Hardware [project codename: Darkwing]
The Darkwing (DWD)—we codename our internal projects after cartoon characters beloved by our team—is a 3-Degree of freedom force-feedback haptic system that we developed as part of the Innovative Solutions Canada Challenge to build a desktop device that could outperform currently existing platforms. We have focused on fundamental robotic principles of a hybrid serial-symetric-parallel mechanism that greatly improves the performance of our device.
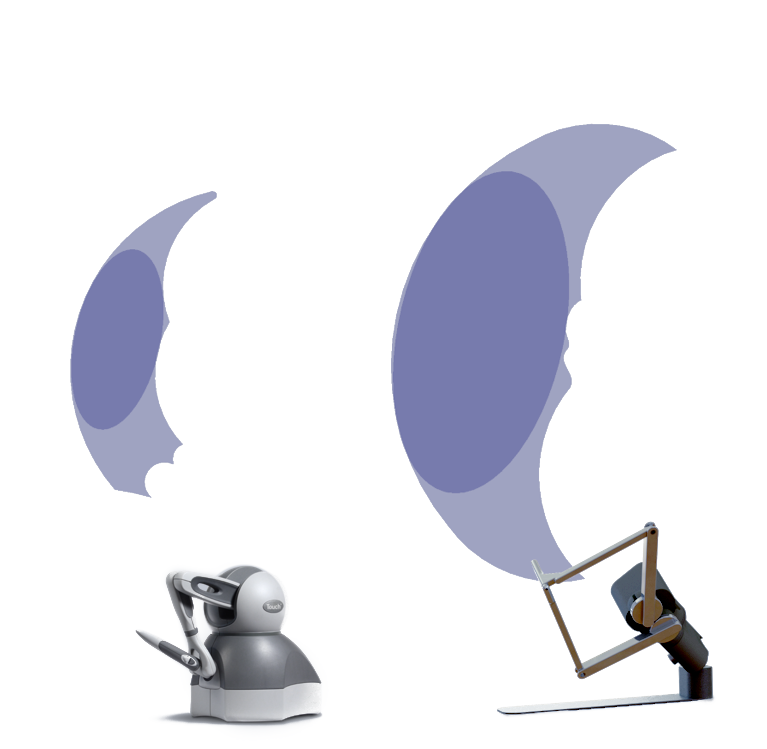
Hardware Comparison
Haply's haptic system outperforms the market by providing 3x the force capability, 3x the position resolution, wireless controllers, untethered 6DoF tracking, and 5x the workspace volume to perform within.

Design for Portability and Versitility (hardware/Marvin10)
Our haptic system has been designed to outperform competing haptic systems while also improving the device portability and versitility of our system. Our system can be reconfigured in real-time to allow surgeons to better align our robot with a new training environment. This also enables us to reconfigure our device to make it more portable for transportation.

Haptic Hardware [project codename: Tweety]
The Tweety (TB) is a 2-Degree of freedom force-feedback haptic system we developed as part of a National Science Foundation project with Stanford University and the University of British Columbia. the tAPI has been prototyped using this 2-DoF system with success and is being ported over to the DWD.
Electronics
Haply designs the electronics that drive the core technolgoies in our haptic system. Our first product, the open-source Modular Haptic Development Platform, has been shipped to over 400 reseachers, teachers, and developers around the world and has proven to be a powerful and robust electronics solution.

Haptic Controller Design
The Modular Haptic Development Kit is the brain powering the haptic Device within the tAPI system architecture. tAPI firmware is deployed to a powerful ARM Cortex M3 processor that handles both the motor controls and the realtime data transfer up to 10kHz between the haptic controller and the simulation.
Wireless Tool Module
Training surgeons require a number of tools and peripherals when performing an operation. We have developed a wireless tool module to facilitate the rapid deployment of various tool types in haptic simulation. The wireless tool module features a WIFI or Bluetooth module, a 9 axis IMU, and an ARM Cortex M0 processor capable of handling a variety of tool i/o at greater than 200Hz.
Software
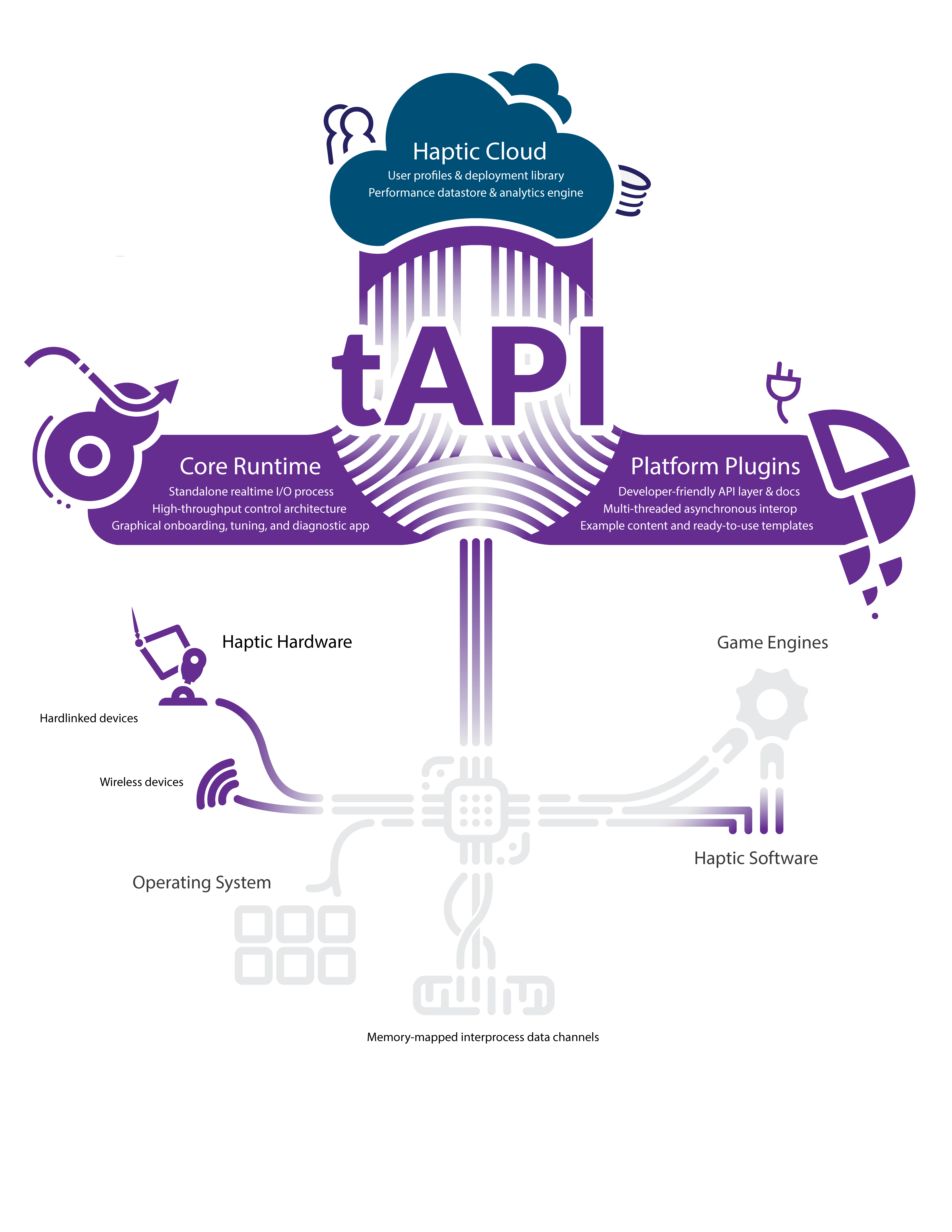
tAPI Architecture
The tAPI is a sucessor to the modular hAPI built out of a National Science Foundation project with Stanford University and the University of British Columbia to design a modular haptic development tool. The hAPI has been used by hundreds of researchers and educators worldwide to teach robotics. The tAPI has improved upon our previous design and distributes haptic communicaiton accross various cores to improve system performance.

Analytics and Diagnostics
Having built a Robotic Operating System (ROS) plugin to work with our haptic system, we can provide critical information about the real-time performance and measurements of our device while running within simulation. Here, a CNC controlled robot we designed with a 6-DoF force-torque sensor can control the position of our haptic system to submillimeter accuracy and monitor device performance.
Haptic Rendering Engine Integration
Haply has integrated our haptic system to work with available open source haptics rendering frameworks such as CHAI 3D and H3D. We licenced the haptics rendering engine, bActive, from the Medical Device team at the National Research Council, creators of the NeuroVR.

Preliminary Game Engine Integration
We believe that the key to any technology is to build it in a way that it can fit seamlessly into designers workflows. Current haptic technology has ignored the importance of designing easy-to-use authoring tools for the simulation designers. We want to empower simulation designers to better use important features of our haptic technolgoy and are focusing our integration efforts on the widely used game engines developers are familiar with.
Roadmap
Haply is integrating cutting-edge softwares and technology to better capture data, improve performance, and provide meaning evaluation metrics for user assessment. These technologies, coupled with our physical simulation data acquisition tool, will propell our platform into the future of training.

6DoF multitool submillimeter tracking
Compelling VR and AR simulation applications require precision tracking of bodies in 3D space. This requires precisely tracking their translational and rotational positions in real-time and communicating the data to the simulation with low latency. Haply is integrating cutting-edge tracking technology to better immerse users as they track multiple tools, move around large simulation environments(30' x 30'), and rapidly swap between instruments.

bActive Software License
Haply has licensed the bActive simulation software from the National Research Council of Canada to perform integration of the haptic rendering engine, data aquisition, and performance evaluation tool into contempoarty simualtion engines. This will accelerate our system development allowing us to bring state-of-the-art software to work within today's most widely used game and simulation development platforms.